Fracture Nucleation and Strength Surface Concepts
Learning objectives
By the end of this lesson, you should be able to:
- Explain the difference between fracture propagation and fracture nucleation.
- Understand why classical Griffith theory is naturally suited to crack propagation but not always to crack nucleation.
- Define the concept of a material strength surface.
- Explain why strength and toughness are independent material inputs.
- Understand why classical phase-field fracture may not correctly predict nucleation in uncracked bodies.
- Describe the main idea behind Aditya Kumar's strength-surface-based phase-field fracture framework.
- Understand the difference between toughness-controlled propagation and strength-controlled nucleation.
1. Propagation versus nucleation
Fracture mechanics has two related but distinct problems:
- Crack propagation
- Crack nucleation
They are often confused, but they are not the same.
Crack propagation
Crack propagation asks:
If a crack already exists, when and how does it grow?
This is the classical setting of Griffith fracture and linear elastic fracture mechanics.
For example, suppose a body already contains a crack of length \(a\). Then we can ask whether the crack grows by comparing the energy release rate \(G\) with the fracture toughness \(G_c\):
If this condition is satisfied, the crack can propagate.
Crack nucleation
Crack nucleation asks:
How does a crack appear in a body that does not already contain a large crack?
This is a more subtle problem.
For example, consider a smooth uncracked specimen under tension. There is no obvious crack tip and no predefined crack length \(a\). Therefore, classical crack-tip quantities such as \(K_I\) and \(G\) are not directly available.
In this case, fracture initiation is often governed by the material's strength.
2. Why Griffith theory naturally describes propagation
Griffith theory is based on an energy competition:
The sharp-crack Griffith energy is
where:
- \(u\) is displacement,
- \(\Gamma\) is the crack set,
- \(\psi_e\) is elastic strain energy density,
- \(G_c\) is fracture energy,
- \(|\Gamma|\) is crack length in 2D or crack surface area in 3D,
- \(W_{\text{ext}}\) is external work.
This formulation is very powerful when cracks already exist.
If a crack grows by a small amount, the body releases elastic energy. The crack grows when the released energy is enough to create new crack surface.
This gives the Griffith criterion:
However, if there is no crack, or only a very small defect, the nucleation problem is not fully determined by \(G_c\) alone.
3. Why nucleation requires strength
Consider a perfectly smooth bar under uniaxial tension.
There is no large crack.
If we only use Griffith's propagation criterion, it is unclear where the first crack should appear.
In real materials, the first crack appears when the local stress state reaches a critical condition. This critical condition is described by the material's strength.
For simple uniaxial tension, a strength condition may be written as
where:
- \(\sigma\) is the tensile stress,
- \(\sigma_t\) is the uniaxial tensile strength.
But real materials do not fail only under uniaxial tension. They may fail under:
- compression,
- shear,
- biaxial tension,
- triaxial stress,
- mixed tension-shear states,
- pressure-dependent stress states.
Therefore, we need a more general concept than a single tensile strength.
That concept is the strength surface.
4. What is a strength surface?
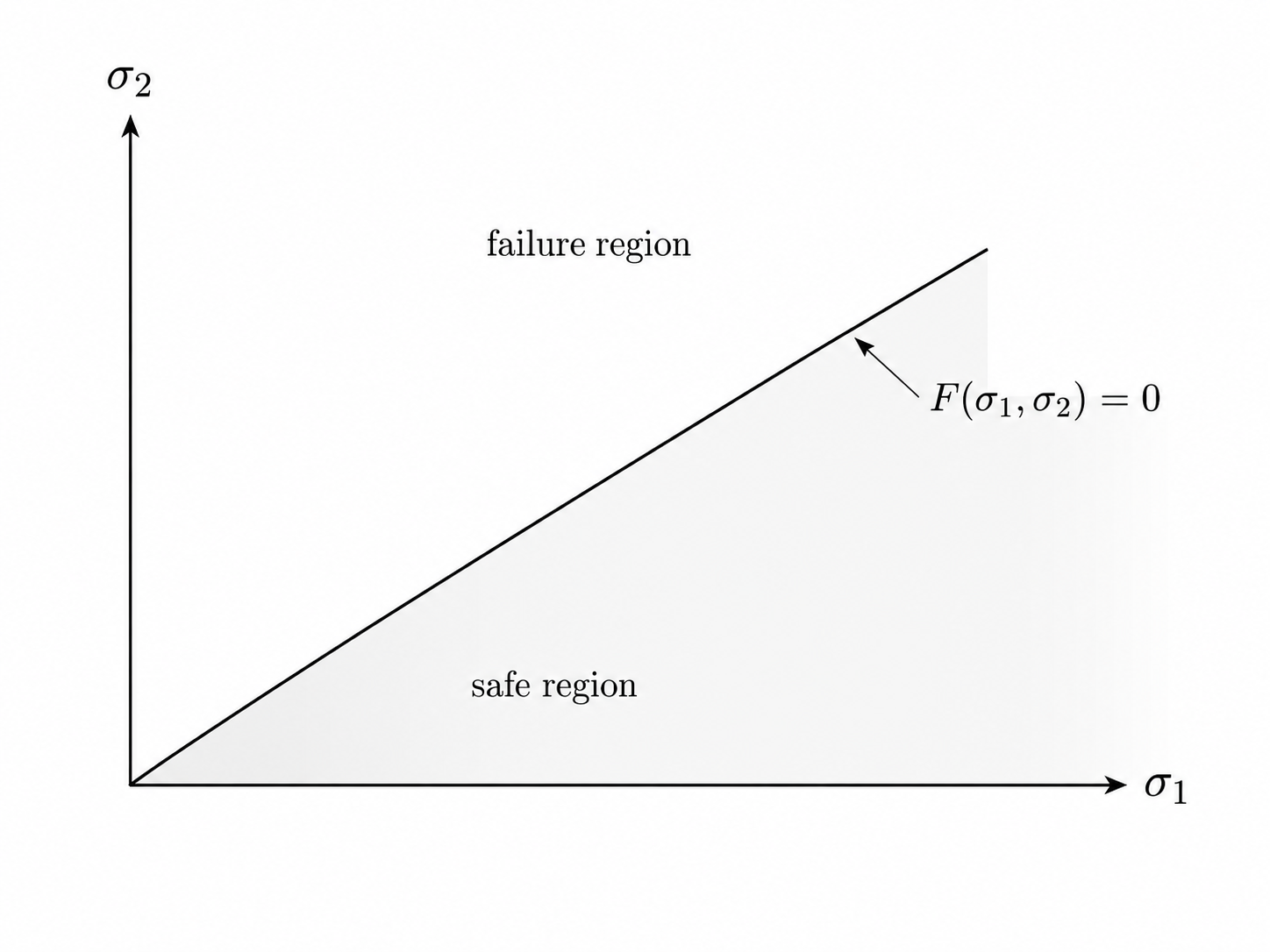
A strength surface is a failure criterion written in stress space.
It defines which stress states are safe and which stress states cause fracture nucleation.
In general, a strength surface can be written as
where:
- \(\sigma\) is the stress tensor,
- \(F(\sigma)\) is a scalar function of stress.
The condition
usually represents safe stress states.
The condition
represents the onset of failure.
The condition
represents inadmissible stress states beyond the material strength.
In principal stress space, the strength surface can be written as
where \(\sigma_1,\sigma_2,\sigma_3\) are principal stresses.
5. Simple examples of strength criteria
Maximum tensile stress criterion
The simplest brittle strength criterion is
This says fracture nucleates when the largest principal stress reaches the tensile strength.
This is easy to understand, but it is not general enough for many materials.
Drucker-Prager-type criterion
For pressure-sensitive materials, strength may depend on hydrostatic pressure and shear stress.
A Drucker-Prager-type surface can be written schematically as
where:
- \(I_1 = \text{tr}(\sigma)\) is the first stress invariant,
- \(J_2\) is the second invariant of deviatoric stress,
- \(\alpha\) controls pressure sensitivity,
- \(s_c\) is a strength parameter.
This kind of surface can distinguish between tensile, compressive, and shear-dominated stress states.
Mohr-Coulomb-type criterion
A Mohr-Coulomb criterion is often used for geomaterials and frictional materials.
It describes failure using normal stress, shear stress, cohesion, and friction angle.
A simplified form is
where:
- \(\tau\) is shear stress,
- \(\sigma_n\) is normal stress,
- \(c\) is cohesion,
- \(\phi\) is friction angle.
This type of criterion captures the fact that compressive pressure can increase shear resistance.
6. Strength versus toughness
A key idea in modern fracture modeling is:
Strength and toughness are different material properties.
Strength
Strength controls when a crack nucleates in an uncracked or nearly uncracked body.
For example:
means the material reaches its tensile strength.
Strength has units of stress:
Toughness
Toughness controls the energy required for crack propagation.
In Griffith fracture, the relevant quantity is the fracture energy:
with units:
or equivalently
A material can be strong but not tough, or tough but not very strong.
For a complete fracture model, especially one that handles both nucleation and propagation, we often need both:
7. Why classical phase-field fracture has a nucleation issue
Classical phase-field fracture is based on the regularized Griffith energy:
where:
- \(u\) is displacement,
- \(d\) is damage,
- \(g(d)\) is the degradation function,
- \(G_c\) is fracture energy,
- \(\ell\) is the regularization length.
This model is excellent at approximating Griffith-type crack propagation.
However, its nucleation behavior is not generally controlled by an independently specified strength surface.
Instead, the apparent nucleation stress often depends on:
- \(G_c\),
- \(\ell\),
- elastic constants,
- degradation function,
- crack density function,
- mesh resolution,
- energy split.
This means the model may not allow the user to independently prescribe:
and
as separate material inputs.
This is a major issue if the goal is to model fracture nucleation in general stress states.
8. The key problem: energy criterion versus strength criterion
Griffith propagation is governed by an energy criterion:
Nucleation in an uncracked body is often governed by a strength criterion:
These two criteria are not the same.
The energy criterion asks:
Is enough energy released to extend a crack?
The strength criterion asks:
Has the local stress state reached the material's failure surface?
A complete theory should handle both:
- crack propagation from large pre-existing cracks,
- crack nucleation from smooth boundaries,
- crack nucleation from the bulk,
- crack nucleation from small flaws,
- mixed-mode and pressure-dependent failure.
This is where Aditya Kumar's work becomes especially important.
9. Kumar's strength-surface viewpoint
Aditya Kumar and collaborators emphasized that phase-field fracture should account for three basic material ingredients:
- The elastic stored-energy function
- The fracture toughness or fracture energy
- The strength surface
These can be written schematically as:
The stored-energy function describes how the material elastically stores energy.
The fracture energy \(G_c\) describes the energetic cost of creating new crack surface.
The strength surface \(F(\sigma)=0\) describes stress states at which fracture nucleates.
This viewpoint is important because classical variational phase-field fracture naturally includes the first two ingredients, but not necessarily the third.
10. Complete nucleation idea
The central goal of the complete nucleation approach is:
Preserve Griffith-type toughness-controlled propagation while also enforcing strength-controlled nucleation.
In other words, the model should do two things correctly:
For large pre-existing cracks
The model should recover Griffith propagation:
For uncracked or nearly uncracked regions
The model should nucleate cracks according to the strength surface:
This is difficult because \(G_c\) and \(F(\sigma)\) are independent pieces of material information.
The complete nucleation approach modifies the phase-field equations so that nucleation is driven by a strength-compatible driving force while propagation remains connected to Griffith fracture.
11. Why this matters physically
Suppose two materials have the same fracture energy \(G_c\), but different tensile strengths.
A classical phase-field model may have difficulty representing this difference unless \(\ell\) or other model parameters are adjusted.
But physically, these two materials should nucleate cracks at different stress levels.
Similarly, suppose two materials have the same tensile strength but different fracture toughness.
They may nucleate at similar stresses but propagate cracks differently.
Therefore, a realistic model should allow separate control over:
and
or more generally:
and
12. Strength surface in stress space
To visualize a strength surface, imagine a stress space with axes:
Each point in this space represents a possible principal stress state.
The strength surface divides this space into:
inside surface → safe stress states
on surface → failure onset
outside surface → inadmissible stress states
A very simplified 2D sketch is:
For isotropic materials, strength surfaces are often expressed in terms of stress invariants instead of individual tensor components.
13. Stress invariants
A stress tensor \(\sigma\) can be characterized by invariants.
The first invariant is
This measures hydrostatic or volumetric stress.
The deviatoric stress is
The second deviatoric invariant is
This measures distortional or shear-like stress.
The third deviatoric invariant is
A general isotropic strength surface may depend on these invariants:
This allows the model to distinguish between different multiaxial stress states.
14. Why pressure sensitivity matters
Many brittle and quasi-brittle materials are pressure-sensitive.
This means their failure depends on whether the material is under tension or compression.
For example:
- glass is much weaker in tension than compression,
- rocks become harder to shear under compression,
- concrete has very different tensile and compressive strengths,
- ceramics may show pressure-dependent fracture nucleation.
A pressure-insensitive criterion based only on tensile energy may miss these effects.
A pressure-sensitive strength surface allows the model to represent different strengths under:
- uniaxial tension,
- uniaxial compression,
- pure shear,
- biaxial loading,
- triaxial loading.
15. Nucleation from the bulk
Bulk nucleation means that a crack starts inside the material, not from a pre-existing large crack or boundary notch.
In a smooth body, this often happens when the local stress reaches the strength surface.
Mathematically, bulk nucleation occurs when
at some point
This is different from crack propagation, where the crack grows from an existing crack tip.
Classical Griffith theory does not directly tell us where a crack should nucleate in a perfectly smooth body.
Strength-surface-based phase-field models try to address this.
16. Nucleation from boundaries
Cracks often nucleate from boundaries because boundaries can create stress concentrations.
Examples include:
- holes,
- corners,
- notches,
- contact points,
- indentation sites,
- material interfaces.
At a smooth boundary, nucleation may still be governed by the local strength surface.
At a sharp notch or small flaw, nucleation may involve both:
- local strength,
- fracture energy,
- flaw size,
- stress concentration.
This is why a complete theory needs to handle both strength and toughness.
17. Large cracks versus small cracks
A useful conceptual distinction is:
Large pre-existing cracks
For large cracks, propagation is mainly governed by Griffith energy balance:
The crack is already present, so the main question is whether extending it releases enough energy.
Small cracks or flaws
For small cracks, the situation is more complicated.
The crack may be too small for classical LEFM assumptions to fully apply.
Nucleation may depend strongly on the strength surface.
No cracks
For a smooth uncracked body, nucleation should be controlled by strength:
A robust phase-field model should transition correctly between these regimes.
18. A simple one-dimensional strength example
Consider a one-dimensional bar under tension.
A simple strength criterion is
The material is safe when
or
Fracture nucleates when
or
In this simple case, the strength surface is just a point on the stress axis.
safe failure
←────────────●────────────→ σ
σt
This is easy in 1D.
In 3D, the strength surface becomes a surface in principal stress space.
19. A Drucker-Prager strength surface example
A Drucker-Prager-type criterion can be written as
where:
- \(I_1 = \text{tr}(\sigma)\),
- \(J_2 = \frac{1}{2}s:s\),
- \(s = \sigma - \frac{1}{3}\text{tr}(\sigma)I\),
- \(\alpha\) controls pressure dependence,
- \(k\) is a strength parameter.
Fracture nucleation occurs when
This type of criterion can represent materials whose resistance depends on hydrostatic stress.
If \(\alpha > 0\), tensile hydrostatic stress may promote failure, while compressive hydrostatic stress may suppress failure.
20. Nucleation in uniform stress
A good test for a nucleation model is uniform stress.
Suppose the entire body is under a homogeneous stress state:
There is no stress concentration and no crack tip.
A strength-surface-compatible fracture model should nucleate when
This is a basic requirement.
If a phase-field model nucleates earlier or later than the strength surface predicts, then the model is not correctly representing the material strength.
21. Nucleation near stress concentrations
Now consider a body with a small hole or notch.
The stress field is not uniform.
Fracture may nucleate near the stress concentration.
A strength-surface approach says nucleation should occur where the local stress first reaches the strength surface:
However, if the defect is large enough, the problem may become more propagation-like, and \(G_c\) becomes important.
Thus, nucleation near notches often involves interaction between:
- local stress concentration,
- strength surface,
- fracture toughness,
- notch size,
- length scale \(\ell\).
This is one of the reasons the nucleation problem is more complex than simple crack propagation.
22. Why strength and toughness interact
Although strength and toughness are independent material inputs, they interact in actual boundary-value problems.
For example:
- A high-strength, low-toughness material may resist nucleation but propagate cracks easily once a crack appears.
- A low-strength, high-toughness material may nucleate damage earlier but resist unstable crack growth.
- A material with pressure-sensitive strength may nucleate cracks differently under tension, shear, and compression.
In phase-field models, the length scale \(\ell\) also interacts with strength and toughness.
Some formulations relate an apparent strength to
This shows why classical phase-field models can have difficulty prescribing strength independently from \(G_c\) and \(\ell\).
23. Apparent strength in classical phase-field models
In many classical phase-field models, the nucleation stress scales like
This is only a scaling statement; the exact coefficient depends on:
- AT1 versus AT2,
- degradation function,
- energy split,
- dimensionality,
- loading condition.
The important point is:
Classical phase-field fracture often ties apparent strength to \(E\), \(G_c\), and \(\ell\), rather than allowing an arbitrary independent strength surface.
This is acceptable for some problems, but it is limiting if the material strength is known experimentally and must be matched.
24. Three material ingredients for brittle fracture
A useful modern viewpoint is that a complete brittle fracture model should include:
1. Elasticity
This determines how the material stores elastic energy.
2. Toughness
This determines the energetic cost of crack surface formation.
3. Strength surface
This determines when cracks nucleate under general stress states.
Classical Griffith fracture focuses mostly on the first two.
Strength-surface-based nucleation models add the third explicitly.
25. Conceptual example: same toughness, different strength
Suppose Material A and Material B have the same fracture energy:
but different tensile strengths:
A correct nucleation model should predict that Material A nucleates cracks at a lower tensile stress than Material B.
However, if a classical phase-field model uses the same \(E\), \(G_c\), and \(\ell\), it may predict the same apparent nucleation stress for both materials.
This shows why an independent strength surface is needed.
26. Conceptual example: same strength, different toughness
Now suppose Material A and Material B have the same tensile strength:
but different fracture energies:
A correct model should predict similar nucleation stress under uniform tension, but different crack propagation resistance.
Material A should propagate cracks more easily because it has lower toughness.
Material B should resist crack growth more strongly.
This again shows why strength and toughness must be treated separately.
27. Strength surface and crack direction
Strength surfaces may also influence crack direction.
In a purely Griffith-based view, crack direction is chosen by energy release.
In a strength-constrained view, cracks can grow only in directions or regions where the stress state is compatible with the material strength condition.
This distinction becomes important in:
- mixed-mode fracture,
- shear-dominated fracture,
- compression-shear fracture,
- out-of-plane crack growth,
- echelon crack formation,
- fracture in pressure-sensitive materials.
In such problems, energy and strength may compete to determine the final crack path.
28. Relation to phase-field length scale
The phase-field length scale \(\ell\) controls the width of the diffused crack.
In classical models, \(\ell\) also influences apparent nucleation strength.
This creates a modeling tension:
- smaller \(\ell\) gives a sharper crack,
- larger \(\ell\) gives a wider damage zone,
- but changing \(\ell\) may also change when damage nucleates.
A strength-surface-based model tries to reduce this problem by allowing nucleation to be controlled by a prescribed material strength surface rather than accidentally by \(\ell\).
29. What Kumar's work contributes conceptually
Aditya Kumar's work is important because it highlights that classical phase-field fracture is incomplete if the goal is to predict both nucleation and propagation in general brittle materials.
The main conceptual contributions can be summarized as:
- Fracture propagation is governed by Griffith-type energy competition.
- Fracture nucleation requires material strength information.
- The strength information should be encoded as a strength surface in stress space.
- A complete phase-field model should include elasticity, toughness, and strength.
- The nucleation driving force can be constructed so that uniform-stress nucleation matches the strength surface.
- The model should still recover toughness-controlled propagation from large cracks.
For your course, the key message is:
Griffith theory tells us when existing cracks grow; strength surfaces tell us when new cracks appear.
30. Common misconceptions
Misconception 1: \(G_c\) alone determines fracture initiation
Not always.
\(G_c\) controls energy cost of crack growth, but nucleation in a smooth body may be governed by strength.
Misconception 2: Phase-field fracture automatically solves nucleation correctly
Classical phase-field fracture allows cracks to appear without explicit crack tracking, but that does not mean the nucleation stress matches the material strength surface.
Misconception 3: The length scale \(\ell\) is just a mesh parameter
The length scale controls the diffused crack width and may influence apparent strength in classical models.
Misconception 4: Tensile strength is enough for all fracture states
A single tensile strength is not enough for general multiaxial fracture.
A full strength surface is needed for arbitrary stress states.
31. Conceptual summary
Fracture has two major aspects:
and
Propagation from a large crack is governed by Griffith's energy balance:
Nucleation in an uncracked or nearly uncracked body is governed by material strength:
Classical phase-field fracture is excellent for regularizing Griffith propagation, but it does not automatically encode an arbitrary material strength surface.
Strength-surface-based phase-field models, especially the framework developed by Kumar and collaborators, aim to include three material ingredients:
This allows the model to represent both:
- toughness-controlled crack propagation,
- strength-controlled crack nucleation.
32. Key terms
| Term | Meaning |
|---|---|
| Crack propagation | Growth of an existing crack |
| Crack nucleation | Formation of a new crack |
| Strength | Stress level at which material failure initiates |
| Toughness | Energy resistance to crack growth |
| Fracture energy \(G_c\) | Energy required to create unit crack surface |
| Strength surface | Surface in stress space defining failure onset |
| Stress invariant | Quantity independent of coordinate rotation |
| Drucker-Prager surface | Pressure-sensitive strength criterion |
| Mohr-Coulomb surface | Frictional strength criterion often used for geomaterials |
| Complete nucleation | Approach that incorporates strength-controlled nucleation into phase-field fracture |
| Apparent strength | Nucleation strength predicted indirectly by a model |
| Bulk nucleation | Crack initiation inside the material |
| Boundary nucleation | Crack initiation from a boundary point |
| Mixed-mode fracture | Fracture involving multiple loading modes |
33. Suggested references
-
Griffith, A. A. (1921). The phenomena of rupture and flow in solids. Philosophical Transactions of the Royal Society of London. Series A.
-
Francfort, G. A., & Marigo, J.-J. (1998). Revisiting brittle fracture as an energy minimization problem. Journal of the Mechanics and Physics of Solids.
-
Bourdin, B., Francfort, G. A., & Marigo, J.-J. (2000). Numerical experiments in revisited brittle fracture. Journal of the Mechanics and Physics of Solids.
-
Kumar, A., Bourdin, B., Francfort, G. A., & Lopez-Pamies, O. (2020). Revisiting nucleation in the phase-field approach to brittle fracture. Journal of the Mechanics and Physics of Solids.
-
Kumar, A. (2020). Nucleation and propagation of fracture and healing in elastomers. PhD dissertation, University of Illinois Urbana-Champaign.
-
Kumar, A., Ravi-Chandar, K., & Lopez-Pamies, O. (2018). The configurational-forces view of the nucleation and propagation of fracture and healing in elastomers as a phase transition. International Journal of Fracture, 213, 1–16.
-
Khayaz, U., Dahal, A., & Kumar, A. (2025). A comparison of phase field models of brittle fracture incorporating strength: I — Mixed-mode loading.
-
Chockalingam, S., Buganza Tepole, A., & Kumar, A. (2026). The phase-field model of fracture incorporating Mohr-Coulomb, Mogi-Coulomb, and Hoek-Brown strength surfaces. Engineering Fracture Mechanics, 340, 112108.
-
Drucker, D. C., & Prager, W. (1952). Soil mechanics and plastic analysis or limit design. Quarterly of Applied Mathematics.
-
Anderson, T. L. (2017). Fracture Mechanics: Fundamentals and Applications. CRC Press.
The strength-surface viewpoint prepares the ground for generalized phase-field models, where strength, toughness, and elasticity are treated more deliberately.