Introduction to Fracture and Griffith Theory
Learning objectives
By the end of this lesson, you should be able to:
- Explain Fracture in general.
- Describe the difference between strength, toughness, and fracture energy.
- Explain Griffith's energy balance argument for crack growth.
- Derive the Griffith critical stress for a crack in a brittle material.
- Connect Griffith theory to modern fracture mechanics and phase-field fracture models.
1. Why do materials fracture?
In classical solid mechanics, we often ask:
Given loads and boundary conditions, what are the stresses and displacements in the body?
For many engineering problems, this is enough. If the stress is below a material strength, the structure is assumed safe. However, fracture introduces a deeper question:
When does a pre-existing crack grow?
A crack is dangerous because it creates a strong local stress concentration. Even if the average stress in a body is small, the stress near a sharp crack tip can become extremely large.
For example, a glass plate with a small scratch may break under a load much smaller than the theoretical atomic strength of glass. Griffith's key insight was that fracture should not be understood only by asking whether the local stress exceeds a strength. Instead, crack growth should be understood as an energy competition.
2. Strength-based thinking versus energy-based thinking
A simple strength criterion may look like:
where:
- \(\sigma_{\max}\) is the maximum stress,
- \(\sigma_c\) is the material strength.
This works reasonably well for many smooth bodies. But for cracked bodies, the stress near an ideal crack tip becomes singular:
where \(r\) is the distance from the crack tip.
As \(r \to 0\), the stress becomes mathematically infinite. Therefore, a simple maximum-stress criterion becomes problematic. If the stress is infinite at the crack tip, why does every crack not grow immediately?
Griffith resolved this by shifting the focus from local stress to total energy.
3. Griffith's central idea
Griffith considered a brittle elastic solid containing a crack. When the crack grows, two competing energy changes occur:
-
Elastic strain energy is released.
The body becomes more compliant, so some stored elastic energy is reduced. -
New crack surfaces are created.
Creating new surfaces costs energy.
Crack growth becomes favorable when the energy released by extending the crack is at least equal to the energy required to create the new surfaces.
This is the essence of Griffith theory:
4. Total energy of a cracked body
For a brittle elastic body, we can think of the total potential energy as
where:
- \(U\) is the stored elastic strain energy,
- \(W\) is the work done by external forces,
- \(\Gamma\) is the surface energy associated with the crack.
For a crack with surface area \(A_c\), the fracture surface energy is often written as
where \(G_c\) is the critical energy release rate or fracture toughness in energy form.
In two-dimensional problems, if the crack length is \(a\), the crack surface contribution is often proportional to \(a\).
5. Energy release rate
The energy release rate \(G\) measures how much potential energy is released when the crack grows by a small amount.
It is defined as
where:
- \(\Pi_{\text{elastic}}\) is the elastic part of the potential energy,
- \(A_c\) is the crack surface area.
For a two-dimensional crack problem, one often writes
up to a thickness factor.
The crack grows when
This is the Griffith fracture criterion.
Note
The quantity \(G\) is not a material property. It depends on the geometry, loading, boundary conditions, and crack length.
The quantity \(G_c\) is a material property. It measures the energy required to create new crack surface.
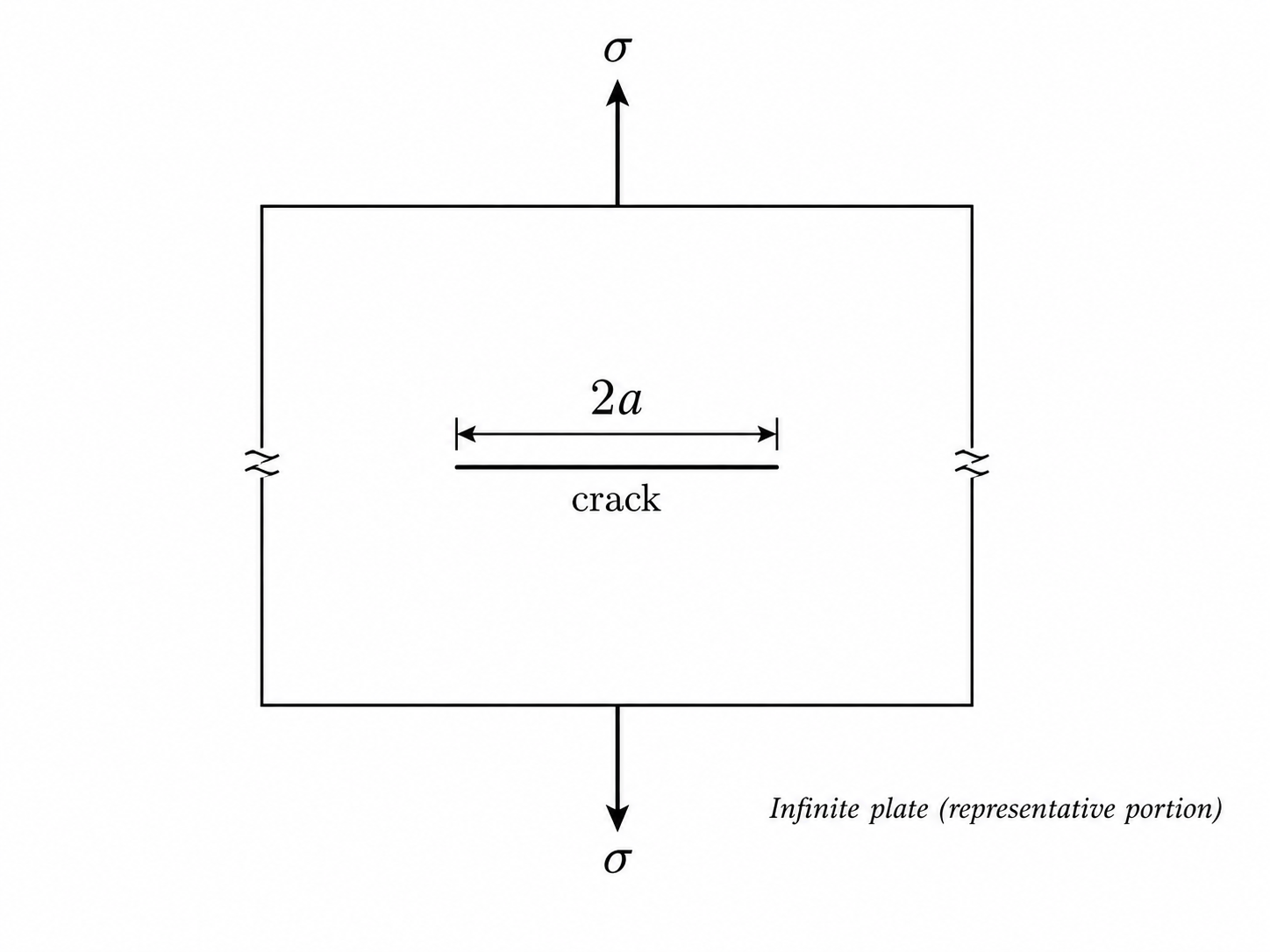
6. Griffith crack in an infinite plate
Consider an infinite plate containing a central crack of length \(2a\), loaded in tension by a remote stress \(\sigma\).
For a linear elastic brittle material, Griffith showed that the crack becomes unstable when
where:
- \(\sigma_c\) is the critical remote stress,
- \(E\) is Young's modulus,
- \(\gamma_s\) is the surface energy per unit area,
- \(a\) is the half-crack length.
Since creating a crack produces two new surfaces, the fracture energy is often written as
Then the critical stress can be written as
This formula reveals a very important result:
So, larger cracks require smaller applied stress to grow.
7. Physical meaning of the Griffith formula
The Griffith formula says:
This has several important consequences.
Effect of crack size
If the crack length \(a\) increases, the critical stress decreases.
That means a material with a long crack can fail at a much lower stress than the same material with a small crack.
Effect of stiffness
If Young's modulus \(E\) increases, the critical stress increases.
A stiffer material stores more elastic energy for a given strain, but the relationship depends on the loading condition.
Effect of fracture toughness
If \(G_c\) increases, the material is harder to fracture.
A high \(G_c\) means the material requires more energy to create new crack surfaces.
8. Stress intensity factor connection
In linear elastic fracture mechanics, the crack-tip stress field is described using the stress intensity factor \(K\).
For a Mode-I crack in an infinite plate,
where:
- \(K_I\) is the Mode-I stress intensity factor,
- \(\sigma\) is the remote tensile stress,
- \(a\) is the half-crack length.
For linear elastic materials, the energy release rate is related to \(K_I\) by
where
Here, \(\nu\) is Poisson's ratio.
The crack grows when
or equivalently,
where
Thus, Griffith's energy theory and stress-intensity-based fracture mechanics are closely connected.
9. Modes of fracture
Crack deformation is commonly divided into three idealized modes.
Mode I: Opening mode
The crack faces separate normal to the crack plane.
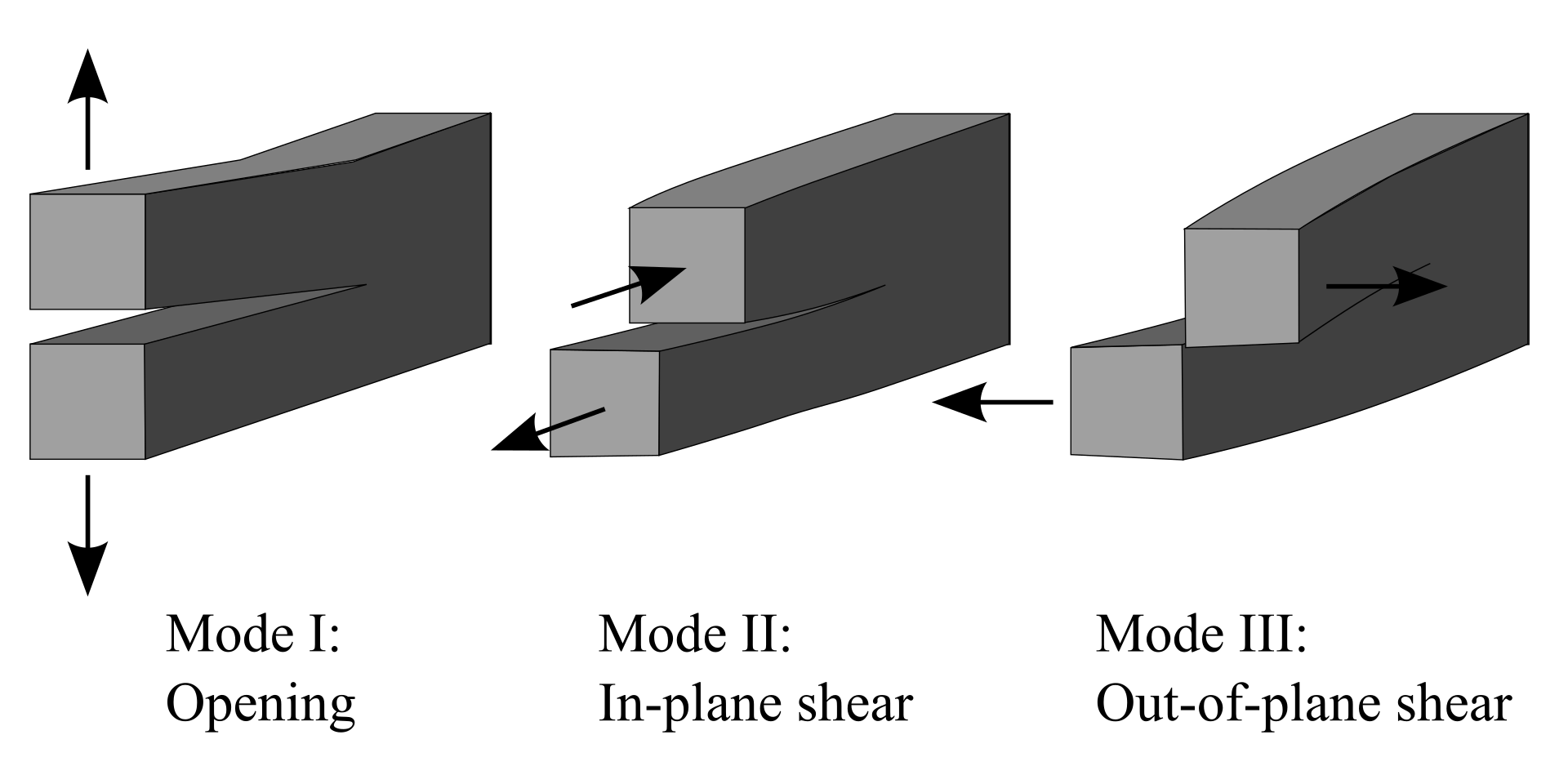
Mode I is the most common fracture mode in brittle tensile cracking.
Mode II: Sliding mode
The crack faces slide relative to each other in the crack plane.
Mode III: Tearing mode
The crack faces slide out of plane relative to each other.
In many practical problems, cracks experience mixed-mode fracture, meaning more than one mode is active.
10. Why Griffith theory matters for phase-field fracture
Modern phase-field fracture models are deeply connected to Griffith theory.
In sharp-crack Griffith theory, the crack surface energy is written as
The challenge is that explicitly tracking a sharp crack surface \(A_c\) is difficult, especially when cracks branch, merge, or nucleate.
Phase-field fracture replaces the sharp crack by a smooth damage field \(d\), where:
- \(d = 0\) means intact material,
- \(d = 1\) means fully broken material.
Instead of explicitly measuring the crack surface area, phase-field models approximate it using a regularized crack surface functional:
where \(\ell\) is the phase-field length scale.
Then the fracture energy becomes
This is one of the central ideas behind variational phase-field fracture:
A sharp Griffith crack is approximated by a smooth damage field with a finite width controlled by \(\ell\).
11. Important limitations of Griffith theory
Griffith theory is fundamental, but it has limitations.
Brittle material assumption
The original theory is most suitable for brittle materials such as glass. In ductile materials, plastic deformation near the crack tip dissipates additional energy.
Pre-existing crack assumption
Classical Griffith theory usually assumes a pre-existing crack. Crack nucleation requires additional modeling assumptions.
Linear elasticity
The basic Griffith formula assumes linear elastic behavior. Nonlinear materials require generalized energy approaches.
Idealized geometry
The closed-form formula for \(\sigma_c\) applies to an infinite plate with a central crack. Real geometries require numerical methods such as FEM.
12. Summary
Griffith theory changed fracture mechanics by showing that crack growth is governed by an energy balance.
The central criterion is
where:
- \(G\) is the energy release rate,
- \(G_c\) is the material fracture energy.
For an infinite plate with a central crack,
This shows that larger cracks reduce the failure stress.
Modern fracture methods, including phase-field fracture, are built on the same basic idea: fracture occurs when the decrease in elastic energy is sufficient to pay the energetic cost of creating new crack surface.
13. Key terms
| Term | Meaning |
|---|---|
| Crack | A discontinuity or separated surface inside a material |
| Brittle fracture | Fracture with little or no plastic deformation |
| Surface energy | Energy required to create new material surface |
| Fracture energy \(G_c\) | Energy required to create a unit crack surface area |
| Energy release rate \(G\) | Energy released per unit crack extension |
| Stress intensity factor \(K\) | Parameter controlling the crack-tip stress field in LEFM |
| Mode I | Opening mode fracture |
| Mode II | Sliding mode fracture |
| Mode III | Tearing mode fracture |
| Phase-field damage \(d\) | Smooth variable representing crack state |
| Length scale \(\ell\) | Parameter controlling the width of the diffused crack |
14. Suggested references
- Griffith, A. A. (1921). The phenomena of rupture and flow in solids. Philosophical Transactions of the Royal Society of London. Series A.
- Irwin, G. R. (1957). Analysis of stresses and strains near the end of a crack traversing a plate. Journal of Applied Mechanics.
- Anderson, T. L. (2017). Fracture Mechanics: Fundamentals and Applications. CRC Press.
- Bourdin, B., Francfort, G. A., & Marigo, J.-J. (2000). Numerical experiments in revisited brittle fracture. Journal of the Mechanics and Physics of Solids.
- Miehe, C., Hofacker, M., & Welschinger, F. (2010). A phase field model for rate-independent crack propagation. Computer Methods in Applied Mechanics and Engineering.